Non rigid Deformation¶
To achieve stabilization, the Stabilize and Template Match stages use a process called Deformation. The Deformation process deforms the keyframe mesh to match the pose of the target mesh for each frame. After deformation, a new result mesh is produced.
The Deformation Algorithm¶
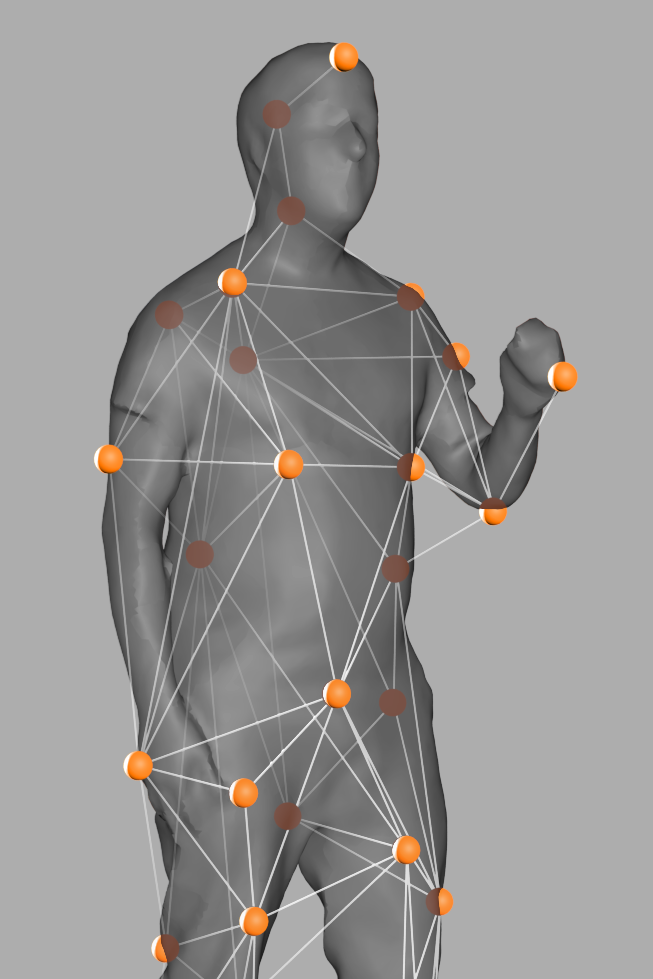
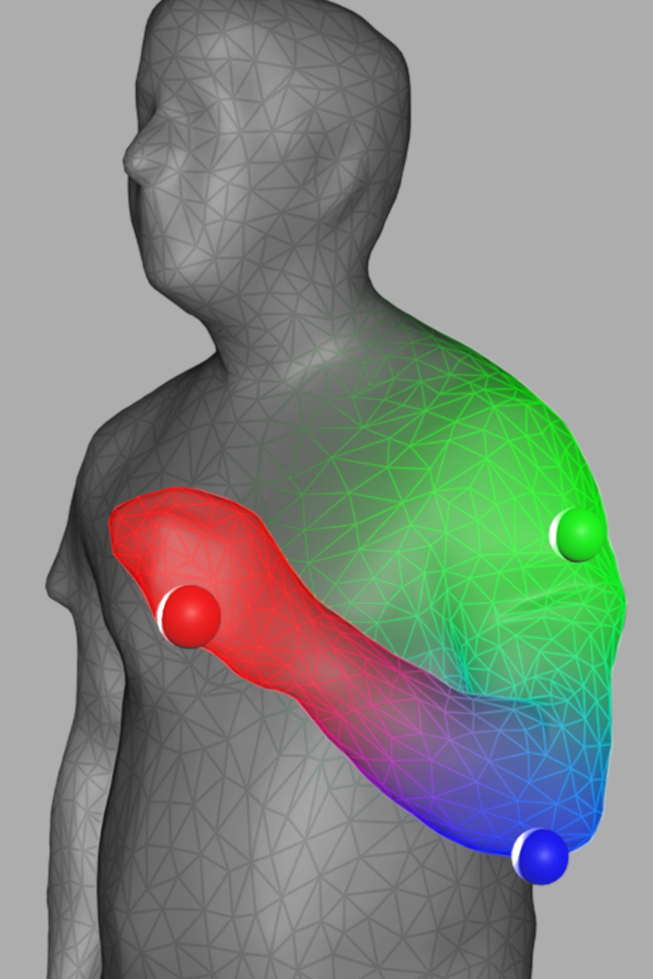 Left: ‘Nodes’ are spread across the surface of the mesh. Right: Each node has an Influence Region where it exerts deformations on the mesh.
Left: ‘Nodes’ are spread across the surface of the mesh. Right: Each node has an Influence Region where it exerts deformations on the mesh.
Stabilization uses a process called “Non Rigid Deformation”, where a lattice of Deformation Nodes are created and used to deform the mesh based on the properties of Correspondence Pairs, which each contain one vertex on the source mesh and one similar vertex on the target mesh.
These nodes are iteratively deformed based on the Correspondence pairs, with new pairs and new deformations applied repeatedly to deform the Keyframe mesh closer and closer to the Target mesh, until it eventually reaches a best possible fit.
To understand the Stabilization process, you can focus on two major pieces of the process:
Nodes
Iterative Deformation
Nodes:
The Deformation process uses a lattice of nodes to drive deformation. Compared to using every vertex on the mesh, using a relatively small number of nodes allows fast, efficient transformation, while also better capturing coarse, stiff motions, like changes in pose.
The total number of nodes depends on the Sample Radius – smaller Sample Radius Factor values produce more nodes. Larger numbers of nodes may capture fine motion more accurately, but processing time grows significantly for each additional node.
Note
The ‘Sample Radius’ is calculated using the Sample Radius Factor value. This is multiplied with the average edge length of the keyframe mesh to produce the final Sample Radius.
Within each Sample Radius, a node influences nearby vertices. The strength of the influence gradually decays to nothing at the end of the Sample Radius. Nodes are distributed evenly using the sample radius such that every vertex on the mesh is influenced by at least one node.
When a node is moved, scaled, or rotated, all of the vertices it influences inherit the same transformation based on their degree of influence by the node.
Important
Nodes are required to drive deformations of large shapes, like changes in pose, but finer grained surface details can still be captured with only a relatively small number of nodes.
Iterative Deformation:
The Deformation process is iterative, with each iteration using the result of the previously deformed iteration. This way, the Stabilize Mesh stage gradually approaches the correct Pose for each Target mesh. Each iteration contains two steps: Identifying Pairs, and Deforming Nodes.
Pairs are identified for each vertex on the Keyframe mesh based on the Match Distance Limit and Match Cosine Limit settings. The closest match within the distance and cosine limits is used to complete the ‘pair’. If no matches exist, no pair is created from that vertex.
Using the pairs that are selected, the lattice of nodes begins a deformation iteration to try to best fit the target mesh. Rather than freely deforming to try and reach the target pairs, nodes are constrained by their neighboring nodes, based on what are called Regularization Weights. These weights, configured by the AlphaRigid and AlphaSmooth parameters, respectively stiffen the lattice of nodes so that individual nodes cannot move freely without sufficient strength, and connects the lattice of nodes so that an individual node that moves drags its neighbors behind it.
With the limitations of the Regularization Weights, after moving to produce a best fit, eventually the nodes will settle into a position with very little freedom to continue deformation. At this point, the iteration ends, and the next iteration begins. On the next iteration, and each subsequent iteration, the AlphaRigid Regularization Weight is decreased by half to introduce more freedom of movement, and pairs are re-calculated based on the new, deformed position of the Keyframe mesh.
Through this process, the Keyframe is gradually deformed to the Target pose, initially with few pairs and stiff motion, and gradually with more free motion as the Deformed Keyframe Pose begins to more closely resemble the target pose.
Finally, when the rigidity term has been fully relaxed, the stabilization algorithm is complete. After completion, the resulting mesh is compared against the target pose to measure the degree of error in the deformation. If the pose error is under the threshold provided by the Segment Max Error setting, the resulting deformed mesh is added to the segment to replace the original target mesh. If the error exceeds the max error threshold, it is discarded, and the process begins again with a new keyframe.